I. Giới thiệu
Robot hướng sáng là loại robot có khả năng so sánh và đi theo hướng có cường độ sáng mạnh hơn. Đây là loại robot khá phổ biến. Có nhiều cách chế tạo và phân loại, đơn giản nhất là loại chỉ sử dụng các linh kiện điện tử cơ bản, khó hơn người ta sử dụng bộ so sánh oxide kim loại bù(CMOS), hoặc biến thể cuối cùng cũng là cao cấp nhất là sử dụng vi điều khiển.
Ở bài viết này xin giới thiệu với các bạn loại robot đơn giản nhất là sử dụng linh kiện điện tử cơ bản.

Hình ảnh mang tính tham khảo
II. Cấu tạo - Hoạt động
1. Mạch điện - bộ não của robot.
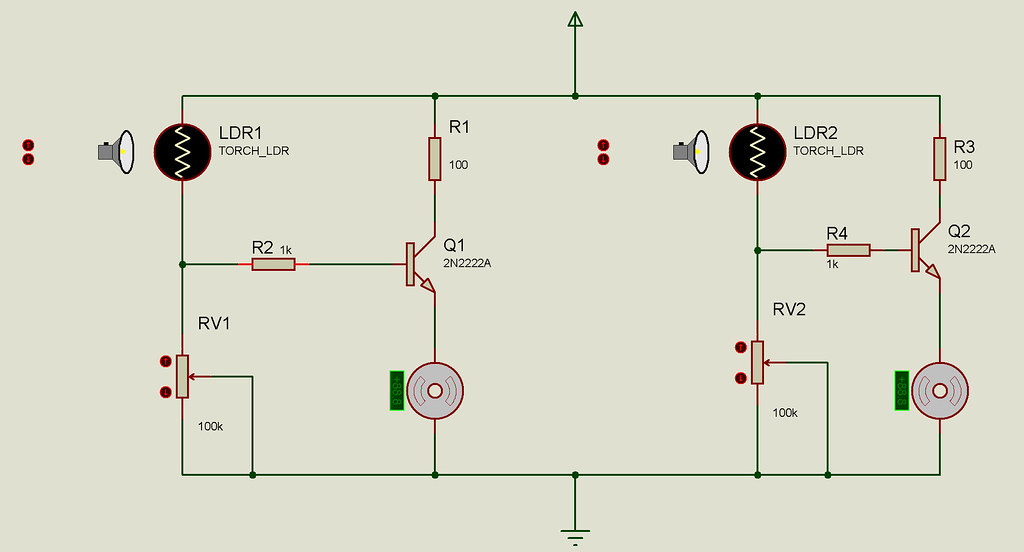
Hoạt động:
+Quang trở và biến trở tạo thành cầu phân áp điều khiển điện áp cấp cho chân B của trasistor làm transistor dẫn mạnh hay yếu tùy thuộc vào điện trở của quang trở.
+Hai hệ thống trên điều khiển 2 động cơ, sự chênh lệch cường độ sáng giữa 2 quang trở làm chênh lệch tốc độ giữa 2 động cơ=> hành vi hướng sáng của robot.
Các bạn có thể download file mô phỏng proteus tại đây để thi nghiệm hành vi của robot.
Linh kiện:
+Quang trở CdS x 2
+ Điện trở 100 Ohm x 2
+Điện trở 1k x 2
+Biến trở 100k x 2
+Transistor 2N2222A
+Động cơ DC x 2
+Nguồn lấy từ pin 9V
2. Bệ robot tham khảo.
Đây là cách bố trí
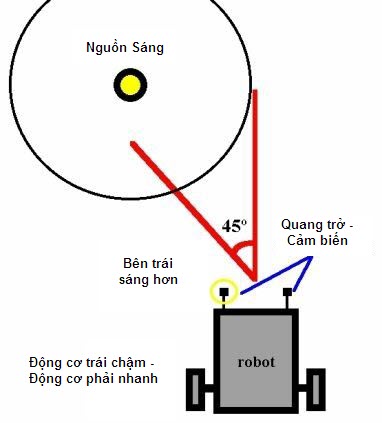
Có gì lạ không? Không có gì lạ cả, quang trở đặt bên phải sẽ điều khiển động cơ bên trái và ngược lại, việc này sẽ tạo hành vi đúng cho robot. Bạn không tin ư? cứ thử đặt ngược lại, việc thay đổi là việc hết sức dễ dàng.
Truyền động:
+Động cơ của robot có thể dùng để kéo 2 bánh xe tạo thành hệ thống dẫn động.
Robot trên sẽ được hướng dẫn trong bài tiếp theo, tuy nhiên hệ thống dẫn động của nó hoàn hoàn sử dụng được trong đồ án này.
Lưu ý để tăng moment quay của động cơ, bạn nên chọn loại động cơ có sẵn hộp số, dễ kiếm ở các chợ trời hoặc máy móc cũ.
+Nếu bạn là người yêu thích robot phỏng sinh học (có các động tác giống sinh vật) bạn có thể thay 2 động cơ DC dẫn động bánh xe bằng 2 động cơ rung của điện thoại, do tính đơn giản của mạch điện trong đồ án này nên 2 động cơ rung hoàn toàn đủ nguồn lực để kéo được thân robot.
Bạn có thể tham khảo kiểu mẫu sau:
Bạn đừng chú ý đến mạch điện trong đoạn video trên vì robot này có nguyên lý hoàn toàn khác với đồ án của chúng ta, cái ta cần quan tâm là bệ chuyển động của robot - chính là nguồn lực có từ 2 động cơ rung như tôi đã nói. Tất nhiên trong quá trình chế tạo bạn có thể tùy biến theo ý của mình để đạt hiệu quả cao hơn. Chúc các bạn thành công !!!








Không có nhận xét nào:
NỘI QUY NHẬN XÉT
Các bạn có thể viết lời bình của mình cho bài viết, và tuân thủ một số quy tắc sau:
>>Các nhận xét phải nghiêm túc, không dung tục, không spam.
>>Các nhận xét phải ghi bằng tiếng Việt có dấu
>>Nội dung phải liên quan đến bài viết
>>Hãy để lại tên hoặc email để chúng tôi tiện trả lời bạn.